
















การติดตั้ง Jib Crane แบบยืนฟรี
เครนแขนหมุนอิสระ, ลักษณะสวยงาม ยืดหยุ่น และเชื่อถือได้ สามารถใช้กันอย่างแพร่หลายในโอกาสต่าง ๆ เช่นการประมวลผลการประชุมเชิงปฏิบัติการ สายการผลิต คลังสินค้า ส่วนบำรุงรักษา ห้องทดสอบ ฯลฯ. การยกวัสดุ และขนส่งขยับภายในช่วงหนึ่ง พวกเขาจะทำให้งานของคุณเพิ่มเติม สะดวก รวดเร็ว และมีประสิทธิภาพยิ่งขึ้น
ร่างโครงสร้างและองค์ประกอบ
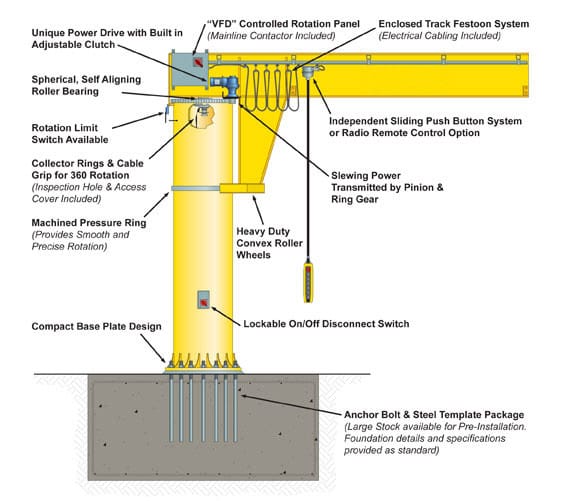
เครนแขนหมุนแบบติดเสาพร้อมมุมแกว่ง 360° ส่วนประกอบหลักคือ:
- แขนหมุน รวมทั้งชุดประกอบรถเข็นวิ่ง ตัวเลื่อนสายเคเบิล บัฟเฟอร์ ฝาปิดท้าย ฯลฯ
- คอลัมน์ รวมทั้งแผ่นรองรับบนและล่าง แบริ่ง และเพลาแนวตั้ง
- ชิ้นส่วนไฟฟ้า ได้แก่ สวิตซ์หลัก ปลอกสายเคเบิล สายเคเบิลแบน ฯลฯ
- พิกัดยกน้ำหนักป้าย ฉลากผู้ผลิต
- รอกโซ่ไฟฟ้า
- สลักเกลียวพื้นหรือสลักเกลียว Anka (ขึ้นอยู่กับเงื่อนไขการติดตั้งของผู้ใช้)
การติดตั้งเครนแขนหมุนฟรี
1. กฎความปลอดภัยสำหรับการประกอบและติดตั้ง:
การต่อโบลต์แรงสูงทั้งหมดต้องขันให้แน่นอย่างถูกต้อง และไม่สามารถเปลี่ยนโบลต์แรงสูงด้วยโบลต์ทั่วไปประเภทอื่นได้ ต้องเปลี่ยนตัวยึดโบลท์หลังจากถอดประกอบและหมุนห้าครั้ง สลักเกลียวความแข็งแรงสูงจะใช้แรงบิดในการขันที่เหมาะสมเท่านั้นเพื่อให้แน่ใจว่าสลักเกลียวแน่นโดยไม่คลาย เว้นแต่ว่าแรงบิดในการขันที่ระบุสูงเกินไป ไม่อนุญาตให้หล่อลื่นเฟิร์มแวร์ที่ต้องห้ามของโบลต์ ขันสลักเกลียวให้แน่นทั้งหมด 1 ถึง 2 เดือนหลังจากใช้งาน ต้องเปลี่ยนน๊อตยึดที่ชำรุด ตรวจสอบข้อกำหนดของการเชื่อมต่อพิน ร่องของหมุดยางยืดต้องอยู่ด้านนอก มิฉะนั้น จะทำให้เกิดการสึกหรอ รอก เครื่องกระจาย และโหลดต้องถูกระงับจากรถเข็นโดยใช้การเชื่อมต่อที่ยืดหยุ่น ข้อต่อเหล็กสามารถสร้างแรงที่ควบคุมไม่ได้และนำไปสู่การแตกหักเมื่อยล้า สำหรับสายลากจูง จะใช้สายแบนทั้งหมดที่มีพลาสติกทนความเย็น สายไฟหุ้มฉนวนและตัวนำป้องกันสายดินของสายเคเบิลทั้งหมดควรทาสีเหลืองเขียว ไม่อนุญาตให้ต่อตัวนำป้องกันสายดินกับสลักเกลียวหรือสกรูสำหรับการยึด จุดต่อสายดินต้องป้องกันไม่ให้คลาย (เช่น โดยใช้ปะเก็นป้องกันการคลายหยัก) และตัวนำป้องกันสายดินไม่ได้รับอนุญาตให้ทำงานปัจจุบัน ควรมีสวิตช์จ่ายไฟสำหรับเชื่อมต่อแหล่งจ่ายไฟและสายไฟของ jib crane มันควรจะสามารถตัดสายเฟสทั้งหมดของแหล่งจ่ายไฟ jib crane ได้ สวิตช์ควรวางไว้ใกล้กับ jib crane และเข้าถึงได้ง่าย สถานที่ควรเป็นป้ายที่เห็นได้ชัดเจน เมื่อดำเนินการบำรุงรักษาและความปลอดภัย สวิตช์เชื่อมต่อแหล่งจ่ายไฟต้องล็อกด้วยกุญแจเพื่อป้องกันไม่ให้แหล่งจ่ายไฟโดยไม่ได้ตั้งใจหรือไม่ได้รับอนุญาต
2. การติดตั้งคอลัมน์ jib crane คอลัมน์:
ตรวจสอบขนาดของสลักเกลียวพื้นฐานคอนกรีตและรูโครงเสาตามแบบขนาดฐานราก ดึงสายไฟ (ที่ลูกค้าให้มา) ออกจากฐานราก โดยวางท่อสายเคเบิลให้มีความยาวเพียงพอ (โดยทั่วไปประมาณ 2~5 ม.) สอดสายไฟผ่านช่องเปิดของโครงแชสซี นำไปที่ช่องเปิดสวิตช์แล้วมัดให้แน่น ติดตั้งเสาขึ้นไปบนฐานราก ปรับคอลัมน์ให้เป็นแนวตั้ง โดยทั่วไป ใช้เครื่องวัดละติจูดและลองจิจูดหรือค้อนวัดบนแกนแนวตั้งเพื่อตรวจสอบการปรับแนวตั้งของคอลัมน์ (ไม่สามารถใช้ตัวคอลัมน์ของคอลัมน์เป็นข้อมูลอ้างอิงการปรับได้) ยึดเสาเข้ากับฐานรากด้วยสลักเกลียว ตรวจสอบให้แน่ใจว่าขันแน่นอย่างถูกต้องและสม่ำเสมอ และขันให้แน่นหลังจากปรับเสาแล้ว
3. การติดตั้งขายึดเครนแขนหมุน:
ตามโครงสร้างของวัตถุก่อสร้าง (โดยทั่วไป คอนกรีตเสริมเหล็ก หรือ ผนังหมุน และ เสาคอนกรีตเสริมเหล็ก H-beam) ที่ไซต์งานของผู้ใช้ (ออกแบบและประกอบโครงยึดที่มีความแข็งแรงและความแข็งแกร่งเพียงพอและการเชื่อมต่อที่เชื่อถือได้ วางวงเล็บให้เข้าที่และขันน็อตให้แน่น ตรวจสอบให้แน่ใจว่าขายึดอยู่ในตำแหน่งแนวตั้งเพื่อให้แขนหมุนสามารถพักได้ในทุกตำแหน่ง โดยทั่วไป ตรวจสอบแนวดิ่งของโครงยึดและปรับโดยใช้ลำแสงวาร์ปหรือลวดแม่เหล็กวางแม่เหล็กค่อยๆ หยดลงบนแกนแนวตั้งของสวิงอาร์ม ขันขายึดให้แน่นกับเสาหรือผนังอย่างไว้วางใจได้ ตรวจสอบให้แน่ใจว่าได้ขันน็อตทั้งหมดให้แน่นเท่าๆ กัน และถูกต้อง หลังจากปรับแล้ว ให้ล็อคน็อตให้แน่น
4. การติดตั้งแขนหมุน:
วิธีการติดตั้งเครนแขนหมุนที่มีมุมแกว่ง ≥ 300°
วิธีที่ 1: รองรับขั้นตอนการติดตั้งแบบเพลาทะลุบวกแบริ่งแรงขับได้ดังนี้
ถอดเพลารองรับที่ติดตั้งไว้ล่วงหน้า + ตลับลูกปืนกันรุนจากปลายด้านบนของคอลัมน์ วางเท้าแขนระหว่างแผ่นรองรับด้านบนและด้านล่าง และวางตลับลูกปืนกันรุนที่ด้านบนของแผ่นรองรับเพื่อให้แน่ใจว่ามีการโคแอกเซียลของรูแขนเสื้อและรูแบริ่งในแกนตามยาวของแขนหมุน ใส่น้ำมันหล่อลื่นจำนวนเล็กน้อยบนแกนหนุนผ่านเพลา และใส่โคแอกเซียลที่มีเพลทคีปเปอร์เข้าไปในรูทะลุจากบนลงล่างจนเพลทคีปเปอร์จะพอดีกับเพลทเสริมด้านบน หมุนแกนทะลุ ปรับตำแหน่งของแผ่นยึด และยึดแผ่นยึดของแกนตัดที่ส่วนรองรับด้านบนด้วยสลักเกลียว หลังจากการทดลองหมุนของแขนหมุนมีความยืดหยุ่นแล้ว ให้วางตัวเลื่อนสายเคเบิล (หรือตัวเลื่อนสายเคเบิล) รถเข็นสำหรับวิ่ง บัฟเฟอร์ ฯลฯ บนแขนและขันน็อตและน็อตทั้งหมดให้แน่น เพื่อชดเชยการปรับ ควรตรวจสอบการเชื่อมต่อแบบสลักและขันให้แน่น 1 ~ 2 เดือนหลังจากส่งมอบเพื่อใช้งาน
วิธีที่ 2: ขั้นตอนการติดตั้งแบริ่งรองรับพร้อมแบริ่งคอมโพสิต
ก่อนติดตั้งคานเท้าแขน ให้ถอดจาระบีป้องกันและทาสีในรูเทเปอร์ ทำความสะอาดและทำให้รูทะลุผ่านให้แห้ง ฉีดจาระบีในช่องหล่อลื่นของตลับลูกปืนคอมโพสิต โดยให้ความสำคัญกับจาระบีลิเธียมที่อายุไม่ง่าย ห้ามใช้สารเติมแต่งอนุภาค วางแขนคานเท้าแขนไว้ระหว่างแผ่นรองรับด้านบนและด้านล่าง และติดตั้งตลับลูกปืนกันรุนระหว่างแผ่นรองรับด้านล่างกับแขนหมุน ใส่เพลาเทเปอร์ที่รองรับลงในรูเทเปอร์ของแขนสวิงผ่านรูแบริ่งคอมโพสิต และควรตรวจสอบให้แน่ใจว่าการยึดเหนี่ยวของเพลาเทเปอร์กับรูเพลาเทเปอร์ จับคู่เพลาเทเปอร์สวิงกับสลักเกลียว M12*140 สเปเซอร์ และน็อตล็อคเข้ากับสวิงอาร์มแล้วขันให้แน่น (ด้านบนและด้านล่างเหมือนกัน) หลังจากที่หมุนเท้าแขนได้อย่างยืดหยุ่นแล้ว ให้ใส่ตัวเลื่อนสายไฟ (หรือตัวเลื่อนสายไฟ) รถเข็นสำหรับวิ่งและบัฟเฟอร์ที่แขน แล้วขันข้อต่อโบลต์ให้แน่น
วิธีการติดตั้ง jib arm ของ jib crane ที่มีมุมการหมุน ≤ 300 °
ขันชุดขับเคลื่อน (มอเตอร์เกียร์) เข้ากับแขนหมุนบนแกนหมุนและขันให้แน่น ยกคานเท้าแขนทั้งหมดขึ้น ให้ลูกกลิ้งบนแกนหมุนให้ชิดกับรางกลมบนคอลัมน์ ในทางกลับกัน ให้แบริ่งบนแกนหมุนจัดแนวกับรูห้องแบริ่งที่ปลายด้านบนของคอลัมน์ ทั้งเพื่อตรวจสอบความเหมาะสม jib จะค่อยๆดึงลงเพื่อให้แบริ่งอยู่ในสถานที่และหลังการใช้งานให้ฉีดจาระบีและนำสกรูต่อมแบริ่ง มีสายไฟชั่วคราวเพื่อให้หลังจากการหมุนของแขนหมุนโดยไม่มีสิ่งกีดขวาง ให้ติดตั้งแขนหมุนเมื่อบล็อกอยู่ในตำแหน่งที่เหมาะสม ติดตั้งตัวเลื่อนสายเคเบิล บล็อกบัฟเฟอร์ กลไกการวิ่ง ฯลฯ บนแขนหมุน และขันน็อตและน็อตทั้งหมดให้แน่น เพื่อชดเชยการปรับ การเชื่อมต่อแบบสลักทั้งหมดควรได้รับการตรวจสอบและขันให้แน่นภายใน 1 ~ 2 เดือนหลังจากส่งมอบ การติดตั้งอุปกรณ์ไฟฟ้าของเครนแขนหมุน
5. แขนหมุนสำหรับการติดตั้งระบบไฟฟ้าติดตาม KHB:
ย้ายรถเข็นไปที่ปลายแขนหมุนเพื่อให้สายแบนลอดผ่านช่องของตัวเลื่อน เมื่อรถเข็นอยู่ในตำแหน่งนี้ สายเคเบิลจะหย่อนประมาณ 30 มม. เมื่อตัวเลื่อนสองตัวห่างกัน 1 ม. ขันสกรูหัวแบนให้แน่นเพื่อยึดสายแบนบนตัวเลื่อน ใส่ปลอกต่อสายแบบรัดแน่นบนสายแบน สอดสายแบนเข้าไปในช่องด้านหน้าของคอลัมน์ และยึดปลอกต่อเข้ากับช่องเปิด ย้อยของสายเคเบิลแบบแบนระหว่างตัวเลื่อนสุดท้ายและปลอกต่อสายเคเบิลต้องมีขนาดใหญ่พอที่จะทำให้แน่ใจว่าสายเคเบิลจะไม่ตึงและไม่เสียดสีกับแผ่นรองรับด้านล่างของคอลัมน์ เนื่องจากสวิงอาร์มจะหมุนตลอดช่วงสวิง ดึงสายแพออกจากช่องเปิดคอลัมน์แล้วต่อเข้ากับสวิตช์ จากนั้นต่อสายไฟเข้ากับสวิตช์พร้อมกัน ต่อสายกราวด์ของสายเคเบิลแบบแบนและสายกราวด์ของสายไฟเข้ากับรูใต้ช่องเปิดของคอลัมน์ด้วยสลักเกลียวและน็อต ใส่ปลอกป้องกันบนสวิตช์และยึดสวิตช์เข้ากับคอลัมน์ด้วยสกรูเกลียวปล่อย ใส่ปลอกต่อสายที่สองที่ปลายหย่อนของสายแบนเพื่อต่อรอกโซ่ไฟฟ้า การติดตั้งทางไฟฟ้าของแขนหมุนเป็นแบบ I-beam หรือ H-beam track (แนะนำแขนหมุนด้วยไฟฟ้าเป็นหลัก) ก่อน ให้ตรวจสอบรางเลื่อนสายเคเบิลที่มีรูปร่างและดูว่าแน่นหรือไม่ ติดตั้งกล่องควบคุมในบิตที่เหมาะสมของเสาเข็ม สอดสายเคเบิลเข้าไปในรางเลื่อนสายเคเบิล ยึดด้วยระยะห่าง 1 ม. แล้วใส่ปลอกเชื่อมต่อที่ปลายทั้งสองข้าง ต่อสวิตช์ กล่องควบคุม และรอก ฯลฯ ตามแผนภาพไฟฟ้า
6. รอกแขวน การติดตั้ง:
ตำแหน่งการติดตั้งของตาต้องแน่ใจว่าพอร์ตเชื่อมต่อกำลังของรอกหันเข้าหาทิศทางของตัวรองรับแขนหมุน วางตายกของรอกไฟฟ้าระหว่างแผ่นยกรถเข็น ใส่สลักรับน้ำหนักแล้วยึดด้วยหมุดยางยืด ตรวจสอบให้แน่ใจว่าช่องเปิดหมุดยางยืดหันออกด้านนอก มิฉะนั้นจะทำให้เกิดการสึกหรอและจะต้องเปลี่ยนหมุดยางยืดใหม่เมื่อประกอบรอกกลับเข้าที่ สำหรับคนอื่น ๆ โปรดดูคู่มือของรอกไฟฟ้า รอกทั้งหมดจะต้องทำเครื่องหมายที่ด้านข้างของคานรับน้ำหนักพร้อมโลโก้และป้ายประกาศยกพิกัด พิกัดกำลังยกของรอกต้องตรงกับพิกัดกำลังยกของ jib ติดป้ายบอกพิกัดกำลังยกและป้ายเครื่องหมายการค้ากับแขนจับอย่างแน่นหนา
หมายเหตุ: ลำดับและวิธีการติดตั้งข้างต้นไม่ซ้ำกัน และอนุญาตให้ผู้ใช้ใช้วิธีการติดตั้งที่ดีกว่า

